A selection of invited lectures and conference presentations.
2026
Beyond White Noise: What Naturalistic Data Reveal About Memory, Heterogeneity, and Latent Regimes in Car-Following Invited
Chair of Econometrics and Statistics, TU Dresden·Dresden, Germany·July 2026
When Context Is Not Enough: Modeling Unexplained Variability in Car-Following Behavior Conference
Podium Presentation, 26th International Symposium on Transportation and Traffic Theory (ISTTT26)·Munich, Germany·July 2026
Discovering Urban Mobility Patterns from Human Behavior to City-Scale Dynamics with Interpretable AI: Interpretable pattern discovery across mobility scales Invited
MIT Senseable City Lab, Massachusetts Institute of Technology·Online·April 2026
Modeling Human Driving as a Dynamic Interaction Process: Uncertainty-Aware Learning from Naturalistic Driving Data Invited
MIT AgeLab, Massachusetts Institute of Technology·Online·April 2026
From Micro Interactions to Traffic Flow: Stochastic Driver Models for Realistic Traffic Simulation Invited
Department of Transportation Engineering, Tongji University·Shanghai, China·February 2026
2025
From Micro Interactions to Traffic Flow: Stochastic Driver Models for Realistic Traffic Simulation Invited
MIT Wu Lab, Massachusetts Institute of Technology·Online·October 2025
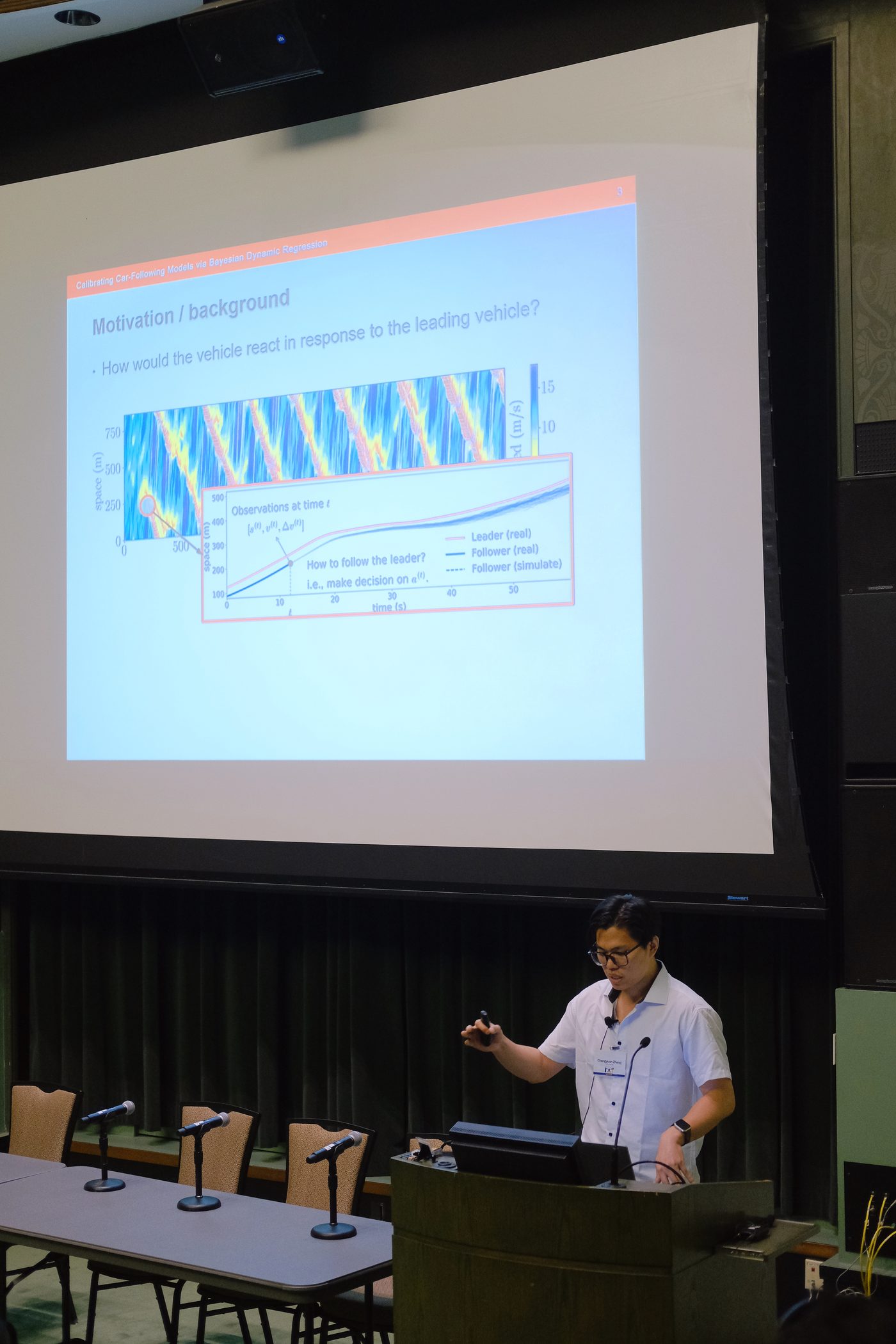
Stochastic Modeling and Simulations of Car-Following Behaviors Invited
JTL Research Seminar, Massachusetts Institute of Technology·Online·February 2025