Chengyuan Zhang
Postdoctoral Researcher, McGill University. Stochastic models of human behavior, and the Bayesian inference that makes them trustworthy.
I am a Postdoctoral Researcher in Civil Engineering at McGill University, working with Prof. Lijun Sun. I received my Ph.D. from the same group in 2026, and my B.Eng. in Vehicle Engineering from Chongqing University in 2019. I was also a visiting researcher at Carnegie Mellon University with Prof. Changliu Liu in 2023 and Prof. Ding Zhao in 2018, and at UC Berkeley with Prof. Masayoshi Tomizuka from 2019 to 2020.
Human behavior is only partly determined by the situation a person is in. I model what is left over. In driving, that residual carries memory, differs systematically between individuals, and switches between latent behavioral regimes, and the same structure reappears when the unit of analysis becomes a road segment rather than a person. Modeling it properly is what allows uncertainty to travel from individual decisions to the collective dynamics they produce, a step most behavior models stop short of. I build the Bayesian inference and the benchmarks that make this practical on naturalistic data, so that simulation, which is how automated vehicles and traffic operations are actually tested, quantifies its uncertainty instead of assuming it away.
Where I am heading. The methods above were developed on driving because it is one of the few human behaviors with both a mature mechanistic theory and enough measurement to test one. I now want to take the same approach to behavior that is harder to measure: interaction between people and automated vehicles, pedestrian movement, and world models with enough cognitive structure to say why someone acted rather than only what they did next. If you work on related problems, I would be glad to hear from you at enzozcy@gmail.com, or you can browse my CV.
Featured Research
Stochastic Behavior Models
Treating variability as structure to be modeled: memory, individual heterogeneity, and latent regimes.
- Markov Regime-Switching Intelligent Driver Model for Interpretable Car-Following Behavior (arXiv: 2506.14762)
- When Context Is Not Enough: Modeling Unexplained Variability in Car-Following Behavior (ISTTT26)
- Calibrating Car-Following Models via Bayesian Dynamic Regression (ISTTT25 & TR Part C)
- A Bayesian Gaussian Mixture Model for Probabilistic Modeling of Car-Following Behaviors (IEEE T-ITS)
Scalable Bayesian Inference & Calibration
Making posterior inference over behavior models tractable, online, and comparable.
- Active Simulation-Based Inference for Scalable Car-Following Model Calibration (arXiv: 2602.05246)
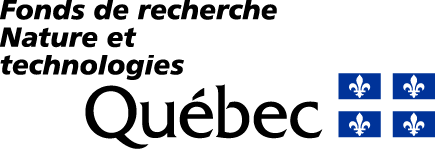
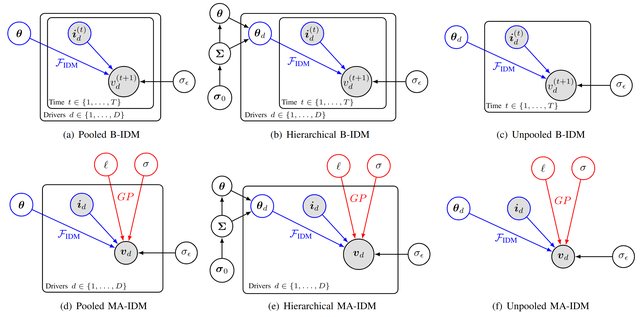
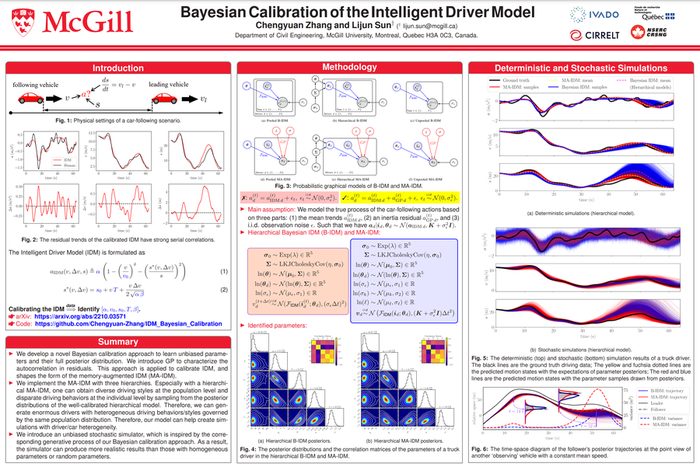
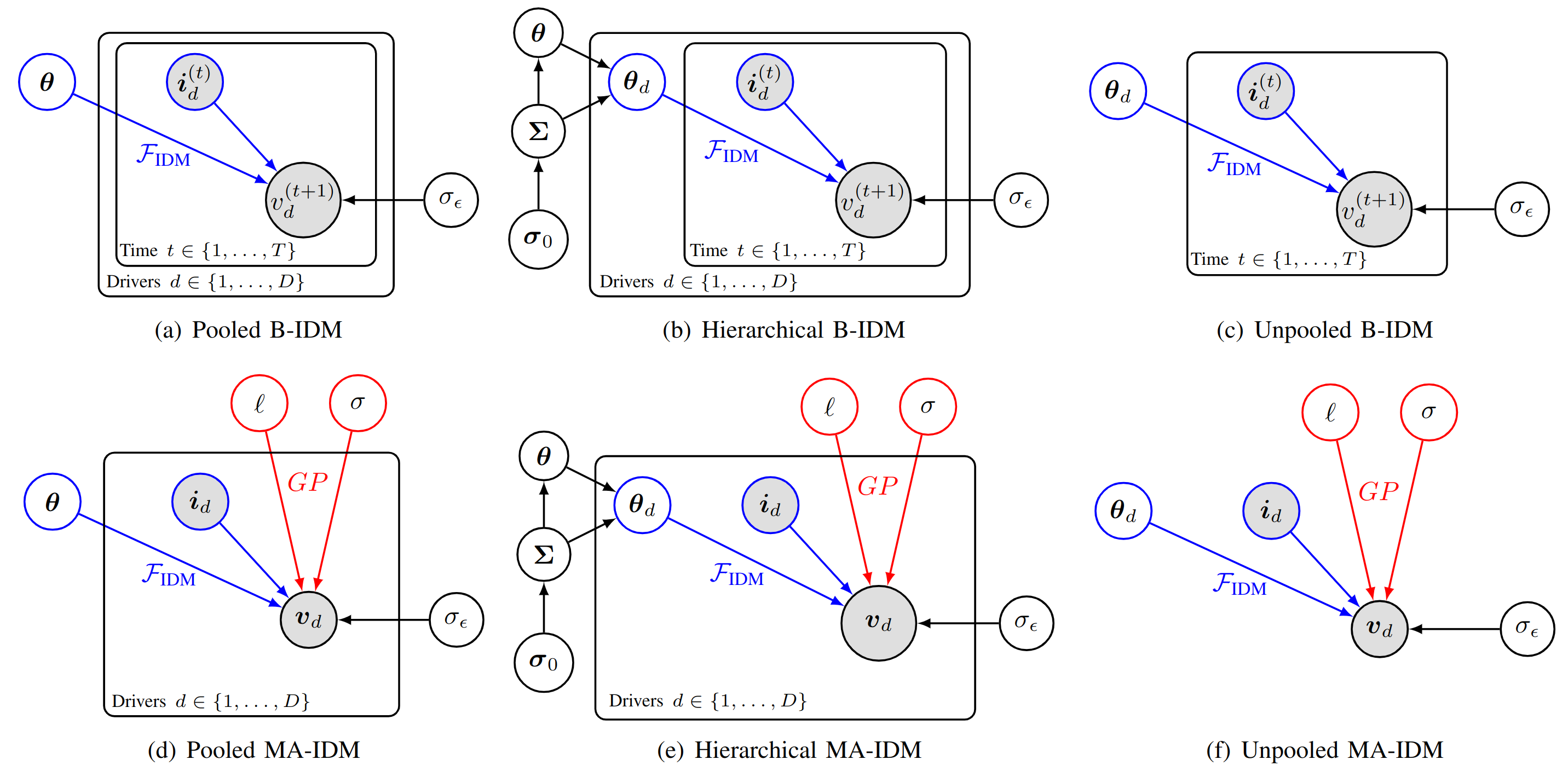
- Bayesian Calibration of the Intelligent Driver Model (IEEE T-ITS)
- AutoTune: A Unified Benchmark for Highway Traffic Microsimulation Calibration (IEEE IV 2026)
- Online Calibration of Context-Driven Car-Following Models (IEEE IV 2026)
From Individual Behavior to Collective Dynamics
Carrying calibrated uncertainty from single decisions up to network and flow scale.
- From Micro Interactions to Traffic Flow: Stochastic Driver Models for Realistic Traffic Simulation (Ph.D. thesis, McGill 2026; one-page summary)
- Discovering dynamic patterns from spatiotemporal data with time-varying low-rank autoregression (IEEE TKDE)
- Forecasting sparse movement speed of urban road networks with nonstationary temporal matrix factorization (Transportation Science)
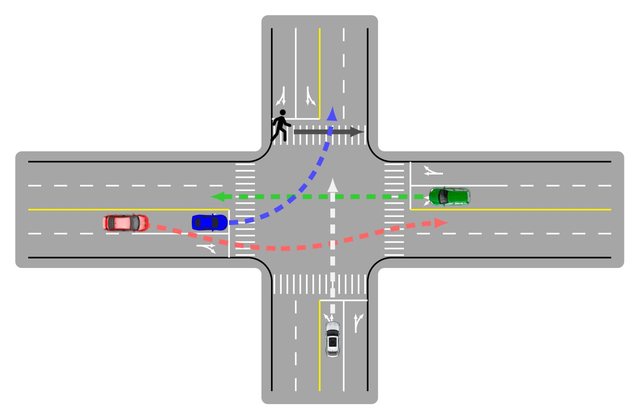
Multi-Agent Interaction
Representing how road users respond to one another, and when that response actually matters.
- Social interactions for autonomous driving: A review and perspectives (Foundations and Trends® in Robotics)
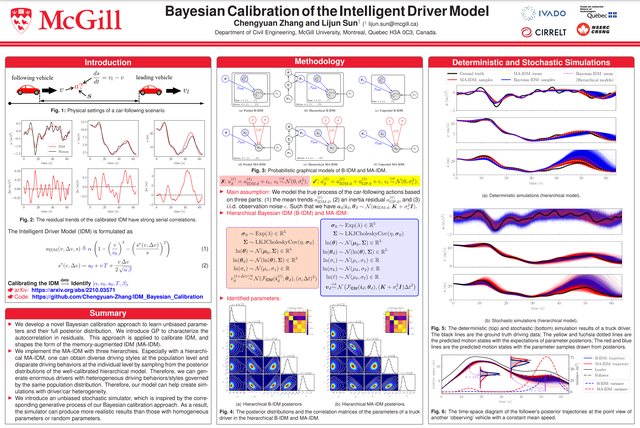
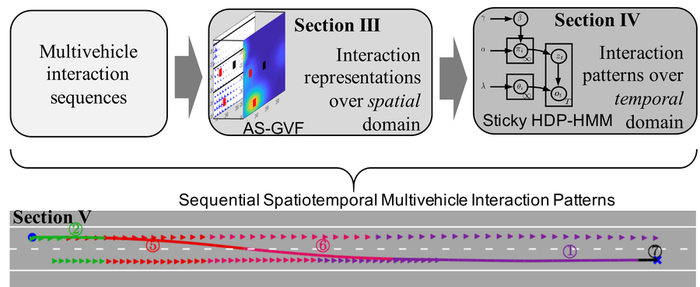
- Spatiotemporal learning of multivehicle interaction patterns in lane-change scenarios (IEEE T-ITS)
- Interactive Car-Following: Matters but NOT Always (IEEE ITSC23)
Selected Publications
News
- 07/2026 Talk at the Chair of Econometrics and Statistics, TU Dresden, hosted by Dr. Martin Treiber: “Beyond White Noise: What Naturalistic Data Reveal About Memory, Heterogeneity, and Latent Regimes in Car-Following.”
- 05/2026 Defended my Ph.D. thesis, From Micro Interactions to Traffic Flow: Stochastic Driver Models for Realistic Traffic Simulation, at McGill University. My thanks to my advisor Prof. Lijun Sun, to my committee, and to everyone who supported me along the way.
- 04/2026 Online talk at MIT Senseable City Lab, hosted by Prof. Carlo Ratti: “Discovering Urban Mobility Patterns from Human Behavior to City-Scale Dynamics with Interpretable AI.”